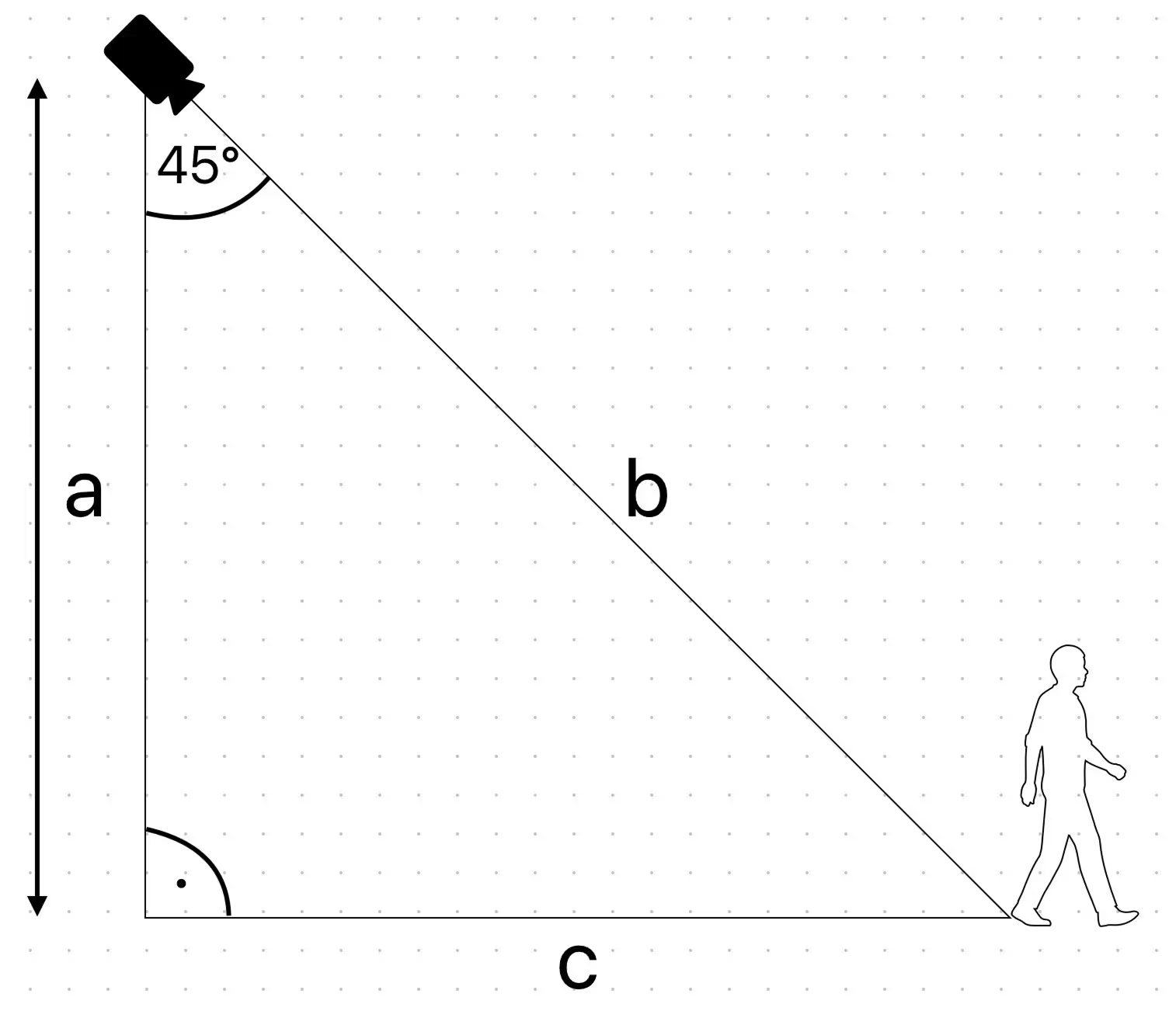
Well, it's really easy. The 1:1 rule states that the drone's flight altitude must not be greater than the distance from uninvolved persons. This means that if you fly 50 m high, you must also maintain a minimum distance of 50 m from the uninvolved persons. If you only fly 20 m high, a distance of... 20 m, that's right. 😉
Well, you see, it's really easy.
But also equally important, because the 1:1 rule is used for the so-called soil risk, In other words, to minimize the risk that your drone poses to objects on the ground.
How does that work?
Imagine the following scenario: You're flying through the area with your drone and suddenly a motor fails. With most drones, this means that the drone will definitely crash.
But now the drone will not fall vertically like a rock to the ground in place, but because it still has a certain horizontal speed, it will travel a certain distance until it hits the ground. This route depends primarily on the altitude, the mass of the drone and, of course, your speed.
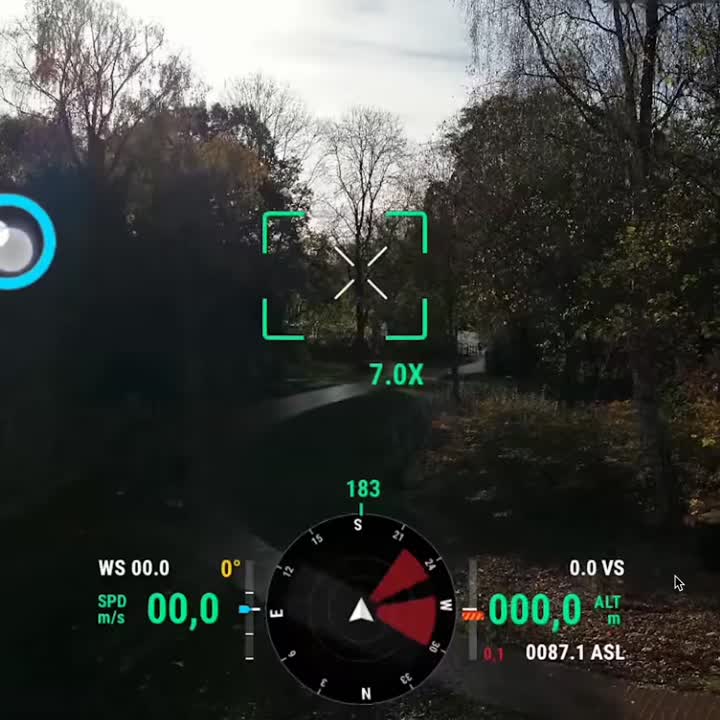
Here is an example of a drone that flies at an altitude of 50 m at a speed of 5 m/s and weighs 900 g (like most Mavics):
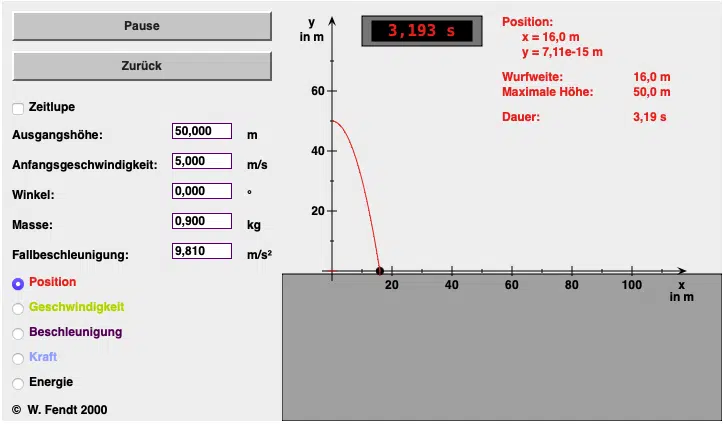
Simulation by Walter Fendt.
Here you can see that the distance traveled after the engine failure is still 16m and it takes about 3s until the drone hits.
By complying with the 1:1 rule, we therefore still have enough safety buffers left over here so as not to endanger uninvolved persons. More specifically, it is 50m - 16m = 34m.
If you repeat the experiment at the maximum speed of 21 m/s, the buffer becomes significantly smaller or is no longer available at all. The distance traveled after engine failure is then 67m! 😳
For example, this is one reason why you have to activate slow flight mode (max. 3 m/s) in the A2 category as soon as you fly closer than 30 m to uninvolved people.
Well, now you know what the 1:1 rule is and why they introduced it.
But now back to the actual topic.